

FOR CAN BUS AND GPS DATA LOGGING, AUTOMATIC SYNCHRONIZATION AND STANDARD ORGANIZATION
OVERVIEW AND APPLICATIONS
 CANpanionEvo is a stand-alone system developed by Attain IT that allows the acquisition and logging of CAN bus and GPS signals, featuring automatic post-processing synchronization among the different signals. Furthermore, the system provides well structured and organized information, assuring significant simplification in data post-processing and database consultation. A read-only method to access the network guarantees data integrity of CAN messages. CANpanionEvo is complemented with the CANpanionTools desktop application, which allows the extraction of the information enclosed in the binary (.dat) files acquired by the on-board processing unit, according to different data selection criteria.
CANpanionEvo is a stand-alone system developed by Attain IT that allows the acquisition and logging of CAN bus and GPS signals, featuring automatic post-processing synchronization among the different signals. Furthermore, the system provides well structured and organized information, assuring significant simplification in data post-processing and database consultation. A read-only method to access the network guarantees data integrity of CAN messages. CANpanionEvo is complemented with the CANpanionTools desktop application, which allows the extraction of the information enclosed in the binary (.dat) files acquired by the on-board processing unit, according to different data selection criteria.
CANpanionEvo is not a simple CAN data logger. It is the base component for advanced applications belonging to the family of ADS (Attain IT DIAGNOSTIC SOLUTIONS), which aim at rendering the systems development testing more efficient. In particular, CANpanionEvo has been originally designed for automotive applications but can be applied to any vehicle. In this field, CANpanionEvo represents a flexible and powerful system for car/trucks/buses prototyping tests that does not require driver’s action or distraction for his/her main activity. CANpanionEvo is the viable answer to all the cases where the collection of organized data is fundamental for further analysis.
OPERATIONAL SCENARIOS
The large experience gained by Attain IT in the diagnostic field makes the CANpanionEvo suitable for all the applications that make use of the CAN interface.
In fact Controller Area Network (CAN) serial bus system is not only limited to the automotive application but is ever been used to a broad range of embedded as well as automation control systems.
The main CAN application fields span:
- Automobiles
- Trucks and buses
- Off-highway and off-road vehicles
- Tractors
- Passenger and cargo trains
- Maritime electronics
- Aircraft and aerospace electronics
- Factory automation
- Industrial machine control
- Lifts and escalators
- Building automation
- Medical equipment and devices
ON-BOARD SOFTWARE DESCRIPTION
The CANpanionEvo software is developed for the acquisition and logging in the SD card of the on-board processing unit raw signals from the CAN bus (through a CAN/USB interface) and the GPS receiver with a standard procedure and format.
DESKTOP APPLICATION
The post-processing tool CANpanionTools, included in the CANpanionEvo kit, is a flexible, user friendly stand-alone application for the extraction of raw data through the generation of:
- MS Excel® based reports summarizing the main information regarding the acquisition session (general data, CAN signals specifications, CAN hardware settings, list of available files)
- MATLAB® ready data format or Comma Separated Value (.csv) files including a set of signals selected by the user
DATA FORMAT AND SYNCHRONIZATION
The MATLAB® or Comma Separated Value files obtained with the CANpanionTools are characterized by:
- appropriate tags
- structure information reporting a record of the data origin
- record of the raw CAN messages
- record of the decoded CAN signals
- synchronized matrix with the whole set of CAN signals and GPS
More precisely, in addition to the raw CAN messages that have their own time references and sampling rates, the generated files also include a synchronized matrix with the whole set of signals selected by the user, referring to a common time basis. The synchronization is based on the time basis generated by the CAN network, which has a resolution of 1 ms. As a result, all extracted signals, including GPS, are synchronized with the same time reference and sampling rate, having that resolution.
SYSTEM REQUIREMENTS
Windows XP
MATLAB® for exploitation of the data structure, further post-processing and for plots generation.
STANDARD DATA FORMAT
A key feature of CANpanionEvo is the robust data logging procedure and the versatility of data files, guaranteed by the compatibility with MATLAB® and Comma Separated Values (.csv) format.
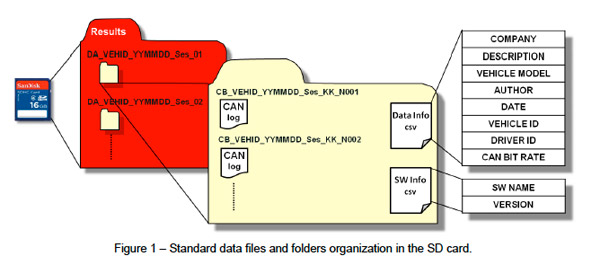
CANpanionEvo organizes data into files and folders that univocally identify the driving test sessions, which are defined as the time interval between the engine start up and shut down. As a new session starts, a new folder is created into the SD card (see 1). The folder name is generated by composition of vehicle ID, date and session progressive number. Furthermore, each session folder contains:
- CAN log files, univocally identified by their name, composed with vehicle ID, date, session progressive number, data file progressive number
- one .csv file (Data Info in 1) created through a straightforward configuration procedure, containing additional information relative to the test sessions: company name, test description, vehicle model, author, date, vehicle ID, driver ID, CAN bit rate
- one .csv file (SW Info in 1) saving name and version of the on-board software installed on the main processing unit during the test sessions.
This information guarantees full traceability of the data and software version.
The Data Info file is created in the SD card through an easy configuration procedure made by the test engineer, provided with the desktop application CANpanionConfigurator.
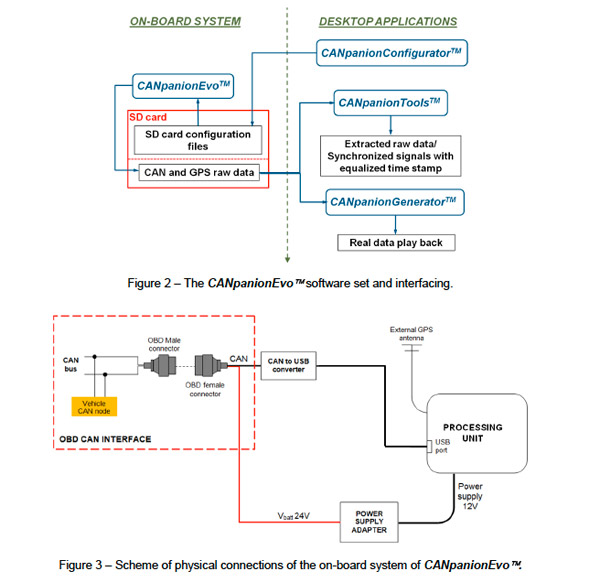
In addition to the robustness and the ease of access of the database generated by CANpanionEvo, the use of a standard data format assures also an easy play back of the CAN traffic on simulators. To this end, Attain IT developed the CANGenerator software that provides the user with a tool for the implementation of laboratory tests with real on the road data, played back to interface and test other equipment for on-board applications or other processing. 2 shows the software set and interfacing.
HARDWARE DESCRIPTION AND CONFIGURATION
CANpanionEvo kit includes the following components:
- Main processing unit (1 unit)
- OBD connector (1 unit)
- CAN to USB converter, in silent mode (1 unit)
- GSP antenna (1 unit)
- 12 V capacitor power supply (1 unit)
- SD cards (2 units)
Optionals:
- 24/12 V converter, for vehicles having 24 V electrical network (1 unit)
CANpanionEvo - On-board system specifications
|
Technical specifications |
|||
|
Processor |
ARM9 400 MHz |
||
|
Power supply |
10-32 V (connected to permanent voltage) |
||
|
Option 1: From OBD connector |
|||
|
Option 2: Directly from vehicle battery |
|||
|
Consumption |
300 mA @ 24 V |
||
|
Interfaces |
|||
|
CAN |
High speed in silent mode |
||
|
GPS Module |
|||
|
Channels |
MTK/66 channels |
||
|
Accuracy |
-165 dBm |
||
|
Fix time with hot/warm/cold start |
1/28/30 seconds |
||
|
Certifications |
|||
|
Electronic unit |
RoHS (directive 2002/95/CE) |
||
|
Certification CE according to EMC directive (electromagnetic compatibility), 2004/108/CE |
|||
|
EN 55022:1998 + A1:2000 + A2:2003 |
|||
|
EN 61000-3-2: 2006 |
|||
|
EN 61000-3-3:1995 + A1:2001 + A2:2005 |
|||
|
EN 55024: 1998 + A1:2001 + A2:2003 EN61000-4-2:1995+ A1:1998 + A2:2001 |
|||
|
EN61000-4-3:2002+ A1:2002 |
|||
|
EN61000-4-4:2004 |
|||
|
EN61000-4-5:1995+ A1:2001 |
|||
|
EN61000-4-6:1996+ A1:2001 |
|||
|
EN61000-4-8:1993+ A1:2001 |
|||
|
EN61000-4-11: 2004 |
|||
|
Certification CE according to directive 72/245/EEC, modification of directive 2009/19/EC |
|||
|
CAN/USB Interface |
Certification CE according to the following EMC standards (electromagnetic compatibility) |
||
|
EN 55022: 1998 radiated |
|||
|
EN 61000-4-2: 1995 |
|||
|
EN 61000-4-3: 1995-03 |
|||
|
EN 61000-4-4: 1995 |
|||
|
EN 61000-4-6: 1996 |
|||
|
Complying with ISO 11898-2 |
|||
|
Complying with section 8.4.2.3.2, Physical media termination, of ISO 15765-4:2005 |
|||
|
Can be assimilated to Type I ECU, with regards to the topological requirements as per section 5.2.2, Topology of SAE J1939-11 |
|||
|
Complying with section 7.7.1, Diagnostic Connector e 7.7.4.2.1, Cable length, of ISO/PAS 27145-4:2006 |
|||
|
Complying with SAE J1939-13 and section 5.2.2, Topology of SAE J1939-11 |
|||