

SISTEMA PER LA REGISTRAZIONE DI DATI BUS CAN E GPS, LA SINCRONIZZAZIONE AUTOMATICA E L’ORGANIZZAZIONE STANDARD
PRESENTAZIONE E APPLICAZIONI
 CANpanionEvo è un sistema stand-alone sviluppato da Attain IT che permette l’acquisizione e la registrazione di segnali bus CAN e GPS, con la sincronizzazione di post-elaborazione automatica tra i diversi segnali. Inoltre, il sistema fornisce informazioni ben strutturate e organizzate, garantendo una significativa semplificazione della post-elaborazione dei dati e della consultazione del database. Un metodo di sola lettura per accedere alla rete assicura l’integrità dei dati dei messaggi CAN. CANpanionEvo è completato dall’applicazione desktop CANpanionTools, che consente l’estrazione delle informazioni racchiuse nei file binari (.dat) acquisiti dall’unità di elaborazione di bordo, secondo diversi criteri di selezione dei dati.
CANpanionEvo è un sistema stand-alone sviluppato da Attain IT che permette l’acquisizione e la registrazione di segnali bus CAN e GPS, con la sincronizzazione di post-elaborazione automatica tra i diversi segnali. Inoltre, il sistema fornisce informazioni ben strutturate e organizzate, garantendo una significativa semplificazione della post-elaborazione dei dati e della consultazione del database. Un metodo di sola lettura per accedere alla rete assicura l’integrità dei dati dei messaggi CAN. CANpanionEvo è completato dall’applicazione desktop CANpanionTools, che consente l’estrazione delle informazioni racchiuse nei file binari (.dat) acquisiti dall’unità di elaborazione di bordo, secondo diversi criteri di selezione dei dati.
CANpanionEvo non è un semplice registratore di dati CAN, ma il componente di base per altre applicazioni avanzate appartenenti alla famiglia delle soluzioni diagnostiche ADS (Attain IT DIAGNOSTIC SOLUTIONS). Il suo obiettivo è rendere più efficiente il collaudo dei sistemi nella fase di sviluppo. In particolare, CANpanionEvo è stato originariamente ideato per applicazioni automotive, ma può essere applicato a qualsiasi veicolo. In questo settore, CANpanionEvo rappresenta un sistema flessibile e potente per le prove di prototipazione di autovetture/autocarri/autobus, che non richiede l’intervento del conducente né lo distrae dalla sua attività principale. CANpanionEvo è la risposta giusta per tutti i casi in cui la raccolta di dati organizzati è fondamentale per ulteriori analisi.
SCENARI OPERATIVI
La grande esperienza maturata da Attain IT nel settore diagnostico rende la soluzione CANpanionEvo adatta a tutte le applicazioni che utilizzano l’interfaccia CAN.
Infatti, il sistema di bus seriale Controller Area Network (CAN) non si limita solo all’applicazione automotive, ma è sempre stato utilizzato per una vasta gamma di sistemi di controllo incorporati nonché di automazione.
I principali campi di applicazione CAN includono:
- Automobili
- Camion e autobus
- Veicoli off-highway e fuoristrada
- Trattori
- Treni passeggeri e merci
- Elettronica navale
- Aerei ed elettronica aerospaziale
- Automazione industriale
- Controllo di macchine industriali
- Ascensori e scale mobili
- Building automation
- Attrezzature e dispositivi medicali
DESCRIZIONE DEL SOFTWARE DI BORDO
Il software CANpanionEvo è stato sviluppato per l’acquisizione e la registrazione su scheda SD di segnali grezzi dell’unità di elaborazione di bordo dal bus CAN (attraverso un’interfaccia CAN/USB) e dal ricevitore GPS con una procedura standard.
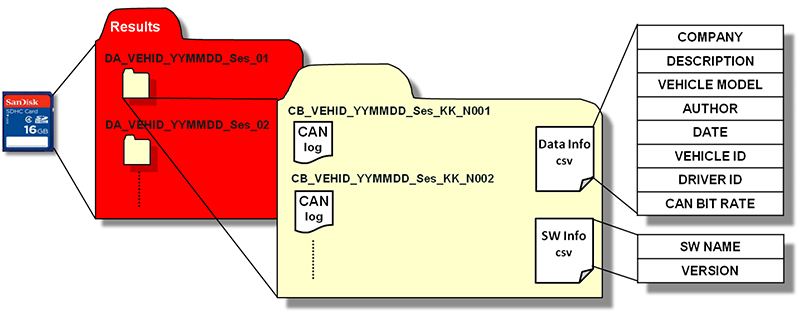
Figura 1 – Organizzazione standard di file e cartelle di dati nella scheda SD.
APPLICAZIONE DESKTOP
Lo strumento di post-elaborazione CANpanionTools, incluso nel kit CANpanionEvo, è un’applicazione stand-alone flessibile e facile da usare per l’estrazione di dati grezzi attraverso la generazione di:
- report basati su MS Excel® che riassumono le principali informazioni relative alla sessione di acquisizione (dati generali, specifiche dei segnali CAN, impostazioni hardware CAN, elenco dei file disponibili)
- file in formato ready data MATLAB® o file Comma Separated Value (.csv) che includono un gruppo di segnali selezionati dall’utente
FORMATO E SINCRONIZZAZIONE DEI DATI
I file MATLAB® o Comma Separated Value ottenuti con CANpanionTools sono caratterizzati da:
- tag appropriati
- informazioni sulla struttura segnalando un record di origine dei dati
- registro dei messaggi CAN codificati
- registrazione dei segnali CAN decodificati
- matrice sincronizzata con l’intero gruppo di segnali CAN e GPS
Più precisamente, in aggiunta ai messaggi CAN grezzi che hanno i propri riferimenti temporali e una propria velocità di campionamento, i file generati comprendono anche una matrice sincronizzata con l’intero gruppo di segnali selezionati dall’utente, che fa riferimento a una base temporale comune. La sincronizzazione è basata sul tempo generato dalla rete CAN, che ha una risoluzione di 1 ms. Di conseguenza, tutti i segnali estratti, compresi quelli GPS, sono sincronizzati con pari riferimento temporale e velocità di campionamento, avendo tale risoluzione.
REQUISITI DI SISTEMA
Windows XP
MATLAB® per sfruttare la struttura dei dati, per la post-elaborazione ulteriore e per la generazione dei grafici.
FORMATO DEI DATI STANDARD
Una funzionalità fondamentale di CANpanionEvo è la solida procedura di registrazione dei dati e la versatilità dei file di dati, garantita dalla compatibilità con il formato MATLAB® e Comma Separated Values (.csv).
CANpanionEvo organizza i dati in file e cartelle che identificano univocamente le sessioni delle prove di guida, definite come intervallo di tempo tra l’avviamento del motore e il suo spegnimento. Quando inizia una nuova sessione, viene creata una nuova cartella nella scheda SD (vedere 1). Il nome della cartella viene generato dalla composizione dell’ID del veicolo, della data e del numero progressivo della sessione. Inoltre, ogni cartella della sessione contiene:
- i file di registro CAN, identificati univocamente dal loro nome, composto dall’ID del veicolo, dalla data, dal numero progressivo della sessione e dal numero progressivo del file di dati
- un file .csv (Data Info in 1) creato per mezzo di una semplice procedura di configurazione, contenente informazioni aggiuntive relative alle sessioni della prova: nome dell’azienda, descrizione della prova, modello del veicolo, autore, data, ID del veicolo, ID del conducente, bit rate CAN
- un file .csv (SW Info in 1) che contiene il nome e la versione del software di bordo installato sull’unità di elaborazione principale durante le sessioni della prova.
Queste informazioni assicurano la massima tracciabilità dei dati e della versione del software.
Il file Data Info viene creato nella scheda SD tramite una facile procedura di configurazione svolta dal collaudatore, fornita dall’applicazione desktop CANpanionConfigurator.
Oltre alla solidità e alla facilità di accesso del database generate da CANpanionEvo, l’uso di un formato di dati standard assicura anche una facile riproduzione del traffico CAN sui simulatori. A tal fine, Attain IT ha sviluppato il software CANGenerator che offre all’utente uno strumento per l’esecuzione delle prove di laboratorio con i veri dati su strada riprodotti sull’interfaccia e per collaudare altre apparecchiature per le applicazioni di bordo o altre elaborazioni. La 2 mostra l’impostazione del software e le interfacce.
DESCRIZIONE E CONFIGURAZIONE DELL’HARDWARE
Il kit CANpanionEvo include i componenti seguenti:
- Unità di elaborazione principale (1 unità)
- Connettore OBD (1 unità)
- Convertitore CAN>USB, in modalità silenziosa (1 unità)
- Antenna GSP (1 unità)
- Alimentatore a condensatore da 12 V (1 unità)
- Schede SD (2 unità)
Elementi opzionali:
- Convertitore 24/12 V, per veicoli con rete elettrica da 24 V (1 unità)
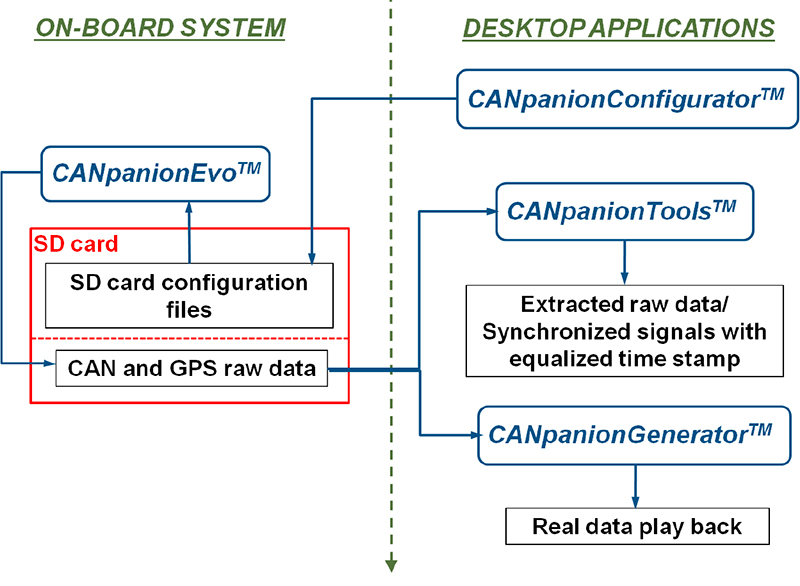
Figura 2 – Impostazione del software CANpanionEvoä e interfacce
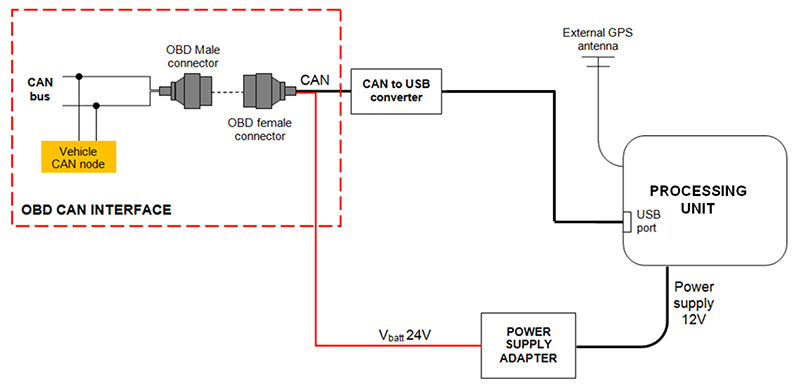
Figura 3 – Schema dei collegamenti fisici del sistema di bordo di CANpanionEvo
CANpanionEvo - Specifiche del sistema di bordo
|
Specifiche tecniche |
|||
|
Processore |
ARM9 400 MHz |
||
|
Alimentazione |
10-32 V (collegato a corrente continua) |
||
|
Opzione 1: Dal connettore OBD |
|||
|
Opzione 2: Direttamente dalla batteria del veicolo |
|||
|
Consumo |
300 mA a 24 V |
||
|
Interfacce |
|||
|
CAN |
Alta velocità in modalità silenziosa |
||
|
Modulo GPS |
|||
|
Canali |
MTK/66 canali |
||
|
Precisione |
-165 dBm |
||
|
Tempo determinato con avvio a caldo/in riscaldamento/a freddo |
1/28/30 secondi |
||
|
Certificazioni |
|||
|
Unità elettronica |
RoHS (direttiva 2002/95/CE) |
||
|
Certificazione CE in conformità con la direttiva EMC (compatibilità elettromagnetica), 2004/108/CE |
|||
|
EN 55022:1998 + A1:2000 + A2:2003 |
|||
|
EN 61000-3-2: 2006 |
|||
|
EN 61000-3-3:1995 + A1:2001 + A2:2005 |
|||
|
EN 55024: 1998 + A1:2001 + A2:2003 EN61000-4-2:1995+ A1:1998 + A2:2001 |
|||
|
EN61000-4-3:2002+ A1:2002 |
|||
|
EN61000-4-4:2004 |
|||
|
EN61000-4-5:1995+ A1:2001 |
|||
|
EN61000-4-6:1996+ A1:2001 |
|||
|
EN61000-4-8:1993+ A1:2001 |
|||
|
EN61000-4-11: 2004 |
|||
|
Certificazione CE in conformità con la direttiva 72/245/EEC, che modifica la direttiva 2009/19/CE |
|||
|
Interfaccia CAN/USB |
Certificazione CE in conformità con le seguenti norme EMC (compatibilità elettromagnetica) |
||
|
EN 55022: 1998 irradiata |
|||
|
EN 61000-4-2: 1995 |
|||
|
EN 61000-4-3: 1995-03 |
|||
|
EN 61000-4-4: 1995 |
|||
|
EN 61000-4-6: 1996 |
|||
|
In conformità con la norma ISO 11898-2 |
|||
|
In conformità con la sezione 8.4.2.3.2, Terminazione supporto fisico, della norma ISO 15765-4:2005 |
|||
|
Assimilabile a ECU di tipo I, per quanto riguarda i requisiti topologici secondo la sezione 5.2.2, Topologia di SAE J1939-11 |
|||
|
In conformità con la sezione 7.7.1, Connettore diagnostico e 7.7.4.2.1, Lunghezza del cavo, della norma ISO/PAS 27145-4:2006 |
|||
|
In conformità con SAE J1939-13 e la sezione 5.2.2, Topologia di SAE J1939-11 |
|||